Оставьте заявку и мы свяжемся с Вами в течение часа!

Предзаказ на модуль с автоматической разметкой Segment Anything в CVAT
SAM:
● позволяет пользователям сегментировать объекты одним щелчком мыши.
● может автоматически находить и маскировать ВСЕ объекты на изображении.
● может генерировать маску сегментации для любой подсказки в режиме реального времени, что позволяет взаимодействовать с моделью в реальном времени.
● работает для Zero-Shot Learning задач. То есть, когда надо настроить модель для своего датасете и очень быстро без трудоемкого обучения.
Модуль в CVAT позволит ускорить разметку на 60% с сохранением высокого качества.
Оставьте заявку и мы вышлем все детали!
Отправляя свои данные, вы даете согласие на обработку персональных данных


Кейсы разметки в CVAT #1
найди отличия
#Data Mining #Обработка изображений #Big Data #Машинное обучение #Искусственный интеллект
Главная
>
>
>
Кейсы разметки в CVAT #1найди отличия
Привет, дорогие читатели! Меня зовут Алина, я работаю операционным менеджером в компании Training Data, которая занимается сбором и разметкой данных. Я веду проекты по разметке, а еще благодаря знанию python пишу скрипты для автоматизации работы своей команды. У меня накопилось много интересного опыта, которым я хочу с вами поделиться.
Своей первой статьей я открываю рубрику разбора любопытных кейсов, с которыми столкнулись я и мои коллеги во время организации разметки данных в CVAT.
“Computer Vision Annotation Tool (CVAT) – это инструмент с открытым исходным кодом для разметки цифровых изображений и видео. Основной его задачей является предоставление пользователю удобных и эффективных средств разметки наборов данных. “ - цитата из статьи создателей.
Все мы с вами прекрасно знаем детскую игру на развитие внимательности и наблюдательности - поиск отличий на картинках. Она встречалась нам в журналах, на календарях, а позже - на сайтах и мемах в VK. Но кто бы мог подумать, что подобная забава дойдет и до разметки данных для обучения нейронных сетей?
Все мы с вами прекрасно знаем детскую игру на развитие внимательности и наблюдательности - поиск отличий на картинках. Она встречалась нам в журналах, на календарях, а позже - на сайтах и мемах в VK. Но кто бы мог подумать, что подобная забава дойдет и до разметки данных для обучения нейронных сетей?

Скриншот взят с сайта: https://www.igraemsa.ru/igry-dlja-detej/igry-na-vnimanie-i-pamjat/najdi-otlichija/osminozhka

С каждым днем появляется всё больше запросов на разметку данных для самых разных нейронок, сфера деятельности которых порой удивляет, смешит или шокирует. Но для каких же направлений деятельности нейронке необходимо научиться находить отличия? Примеров можно найти кучу: пустоты на полках, забытые вещи, счетчик движения и т.д.
Передо мной встала задача организовать разметку данных покадровой съемки помещений, в которых люди случайно или специально оставляли предметы. Разметчикам необходимо было выделить область изменения на кадрах с помощью bbox (прямоугольника), также необходимо было, чтобы область изменения была зафиксирована на двух кадрах: кадр "до изменения", кадр "с изменением". Странные запросы от ребят из команды разработчиков нейронки я получаю не в первый раз, поэтому без лишних вопросов приступаем к задаче.
Инструмент для разметки данных CVAT не позволяет показывать в одной рабочей области сразу два и более отдельных изображений. Присутствует возможность лишь перелистывать изображения.
Передо мной встала задача организовать разметку данных покадровой съемки помещений, в которых люди случайно или специально оставляли предметы. Разметчикам необходимо было выделить область изменения на кадрах с помощью bbox (прямоугольника), также необходимо было, чтобы область изменения была зафиксирована на двух кадрах: кадр "до изменения", кадр "с изменением". Странные запросы от ребят из команды разработчиков нейронки я получаю не в первый раз, поэтому без лишних вопросов приступаем к задаче.
Инструмент для разметки данных CVAT не позволяет показывать в одной рабочей области сразу два и более отдельных изображений. Присутствует возможность лишь перелистывать изображения.
Интерфейс CVAT

Поэтому на этапе загрузки изображений в CVAT я столкнулась со следующей проблемой: как показывать разметчику (человеку, который будет размечать данные) сразу несколько кадров?
Если выполнять эту задачу "в тупую", то мы просто заливаем в CVAT все кадры в их порядке, и разметчику нужно будет листать кадры вперед-назад, чтобы определить на них отличия.
Далее нужно будет разметить bbox на одном кадре и сделать точно такой же bbox на другом. Времени такой метод займет очень много, качество будет сомнительным, разметчики будут быстро уставать. Поэтому начинаем придумывать оптимизацию.
Самое простое решение для проблемы с перелистыванием кадров - соединить соседние кадры в одно изображение.
Плюсы: легко и быстро программируется на Python через PIL; разметчику удобно сравнивать два кадра.
Минусы: увеличивается вес изображений, что ведет к повышению времени ожидания загрузки изображения в CVAT (однако и это можно пофиксить при желании).
Если выполнять эту задачу "в тупую", то мы просто заливаем в CVAT все кадры в их порядке, и разметчику нужно будет листать кадры вперед-назад, чтобы определить на них отличия.
Далее нужно будет разметить bbox на одном кадре и сделать точно такой же bbox на другом. Времени такой метод займет очень много, качество будет сомнительным, разметчики будут быстро уставать. Поэтому начинаем придумывать оптимизацию.
Самое простое решение для проблемы с перелистыванием кадров - соединить соседние кадры в одно изображение.
Плюсы: легко и быстро программируется на Python через PIL; разметчику удобно сравнивать два кадра.
Минусы: увеличивается вес изображений, что ведет к повышению времени ожидания загрузки изображения в CVAT (однако и это можно пофиксить при желании).
Пример функции glue_together, которая выполняет "склеивание" двух изображений в одно:
from PIL import Image
import os.path as osp
def glue_together(image1, image2, out_path):
img1 = Image.open(image1)
img2 = Image.open(image2)
width = img1.size[0]*2 #определяем ширину будущего "склеенного" изображения
height = img1.size[1] #берем высоту первого изображения
img = Image.new('RGB', (width, height))
img.paste(img1, (0,0))
img.paste(img2, (img1.size[0], 0))
img.save(osp.join(out_path,
f'{osp.basename(image1)}__{osp.basename(image2)}'))
В функции использовались две библиотеки: PIL (pillow) и os. Первая позволяет обрабатывать изображения (я лично отдаю этой библиотеке большее предпочтение, чем OpenCV), вторая в данном случае нацелена на помощь в написании пути к файлу.
Обращаю внимание на то, что в моем кейсе все изображения имели одинаковую ширину и высоту, что позволило не запариваться с тем, чтобы подгонять файлы разной величины друг под друга.
Для примера я обрезала двух осьминожек:
Обращаю внимание на то, что в моем кейсе все изображения имели одинаковую ширину и высоту, что позволило не запариваться с тем, чтобы подгонять файлы разной величины друг под друга.
Для примера я обрезала двух осьминожек:

Осьминожка правый

Осьминожка левый
И, использовав функцию glue_together, склеила их:

Осьминожки вместе! :)
Отлично! Теперь разметчику будет легче ориентироваться среди кадров. Однако уже перед началом разметки появляются новые вопросы:
Вопросы действительно толковые и решение их приведет к более быстрой и качественной разметке. Если не решить их, то разметчику придется:
а) запоминать параметры первого bbox'а, чтобы сделать точно такой же второй;
б) постоянно ориентироваться на "прицел" в CVAT, который поможет в определении верхней и нижней границы bbox;
в) стараться попасть в такую же точку левого верхнего угла первого bbox'а при создании второго bbox'а, ведь "прицел" не помогает определить правую и левую границы, поэтому придется работать "на глаз".
- Как мне точно узнать, где заканчивается один кадр и начинается другой?
- Выделение одинаковых областей "на глаз" на двух кадрах - достаточно сложно и займёт много времени, можем как-то ускорить? Можем как-то упростить?
Вопросы действительно толковые и решение их приведет к более быстрой и качественной разметке. Если не решить их, то разметчику придется:
а) запоминать параметры первого bbox'а, чтобы сделать точно такой же второй;
б) постоянно ориентироваться на "прицел" в CVAT, который поможет в определении верхней и нижней границы bbox;
в) стараться попасть в такую же точку левого верхнего угла первого bbox'а при создании второго bbox'а, ведь "прицел" не помогает определить правую и левую границы, поэтому придется работать "на глаз".
Пример такой неоптимизированной разметки
Первое, что приходит на ум - сделать сетку поверх изображения. Идея достаточно годная, и она даже решит все вышеупомянутые проблемы. Но мне подсказали более крутой вариант: не просто нарисовать сетку на исходном изображении, а создать сетку в виде разметки в самом CVAT, чтобы разметчикам оставалось лишь менять классы bbox'ов, не тратя время на их создание.
Супер, круто, офигенно! Но... как это реализовать?
Делюсь пошаговой инструкцией:
Так как файлы мы уже залили в CVAT, у нас создался таск и, значит, сгенерировался xml файл с разметкой. Для того, чтобы скачать его, необходимо зайти на страницу таска, в правом верхнем углу кликнуть на Actions, выбрать Export task dataset, в списке Export format выбрать CVAT for images 1.1 и нажать OK.У вас скачается архив, в котором лежит xml файл с разметкой. Откроем его.
Супер, круто, офигенно! Но... как это реализовать?
Делюсь пошаговой инструкцией:
Так как файлы мы уже залили в CVAT, у нас создался таск и, значит, сгенерировался xml файл с разметкой. Для того, чтобы скачать его, необходимо зайти на страницу таска, в правом верхнем углу кликнуть на Actions, выбрать Export task dataset, в списке Export format выбрать CVAT for images 1.1 и нажать OK.У вас скачается архив, в котором лежит xml файл с разметкой. Откроем его.
Исходный файл с "пустой" разметкой
Пример инфы об одном bbox'е на изображении
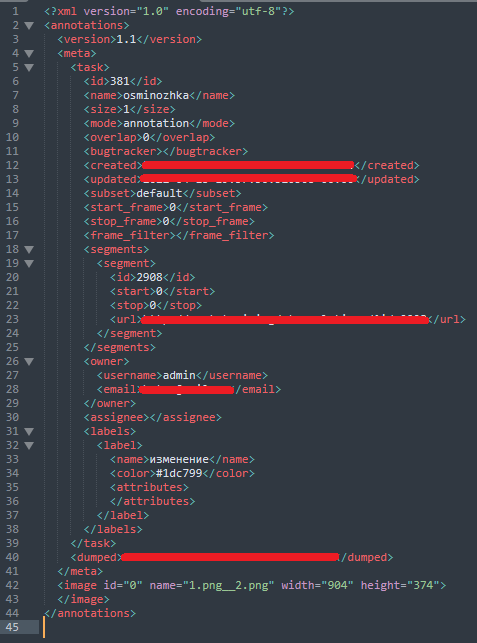

Тег <meta>, описывающий всю инфу о таске, нам не нужен, с ним мы работать не будем. Наше внимание обращаем на тег <image>. Как раз в нём должна быть информация о разметке на конкретном изображении. Создадим рандомный bbox на фотографии и посмотрим как изменится файл.
Под тегом <meta> появился тег <box>. В нем мы видим название класса (label) и координаты bbox'а: xtl (x top left) - левая верхняя точка по x, ytl (y top left) - левая верхняя точка по y, xbr (x bottom right) - правая низшая точка по x, ybr (y bottom right) - правая низшая точка по y.
Для работы с xml воспользуемся библиотекой ElementTree:
Для работы с xml воспользуемся библиотекой ElementTree:
import xml.etree.ElementTree as ET
from tqdm import tqdm
import os.path as osp
def make_patches(w, h, numb_lines=10): #создание списка координат bbox'a
step = int(h / numb_lines)
coords = []
for x in range(0, w, step):
for y in range(0, h, step):
x1, y1, x2, y2 = x, y, x + step, y + step
coords.append((x1, y1, x2, y2))
return coords
def pre_annotation(empty_annotation, pre_annotation):
#создание нового файла разметки
tree = ET.parse(empty_annotation)
root = tree.getroot()
for child in tqdm(root):
if child.tag not in {'version', 'meta'}:
image_coords = make_patches(int(child.attrib['width']),
int(child.attrib['height']), 10)
for coord in image_coords:
bbox = ET.Element('box', label="без изменений", occluded="0",
source="pre_annotated",
xtl=str(coord[0]), ytl=str(coord[1]),
xbr=str(coord[2]),
ybr=str(coord[3]),z_order="0")
child.append(bbox)
xml_str = ET.tostring(root, encoding='utf-8', method='xml')
with open(osp.join(pre_annotation,'pre_annotation.xml'), 'wb') as xmlfile:
xmlfile.write(xml_str)
xmlfile.close()
Для того, чтобы загрузить наш файл с предразметкой - pre_annotation.xml, необходимо снова зайти на страницу таска, в правом верхнем углу кликнуть на Actions, выбрать Upload annotations, в выпадающем списке выбрать CVAT 1.1 и указать путь к файлу pre_annotation.xml.
Предразметка загрузится на таск и CVAT об этом сообщит:
Предразметка загрузится на таск и CVAT об этом сообщит:
Откроем изображение и посмотрим что получилось:
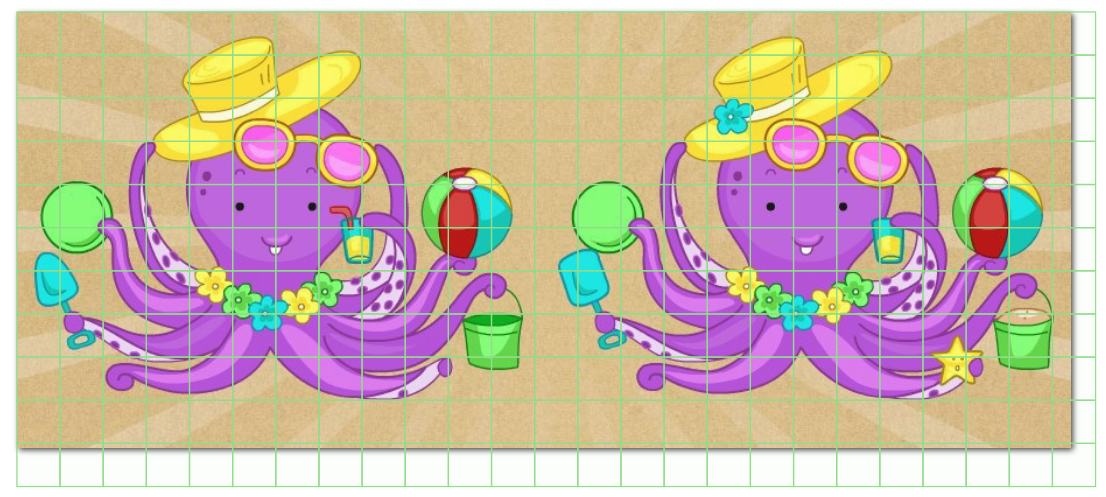
Как мы видим, сетка наложилась удачно. Однако она не ориентирована на то, что наше изображение состоит из двух кадров, и нам необходимо, чтобы каждый bbox для каждого кадра имел одинаковые координаты, когда мы будем обрабатывать результат разметки. В данном же примере координаты левого верхнего bbox'а левого кадра НЕ равны координатам левого верхнего bbox'a правого кадра. Для этого даже не нужно залезать в xml и просчитывать разметку отдельно для каждого кадра, это видно сразу по тому, как bbox'ы съехали за правую границу склеенного изображения.
Данный недочет необходимо исправить. А также появилась новая идея: сделать так, чтобы при выборе одного бокса, второй бокс-дубликат с другого кадра автоматически изменялся. Я видела два варианта решения этого вопроса:
1. создать такую сетку, где bbox'ы будут связаны;
2. решить этот вопрос при обработке файла разметки
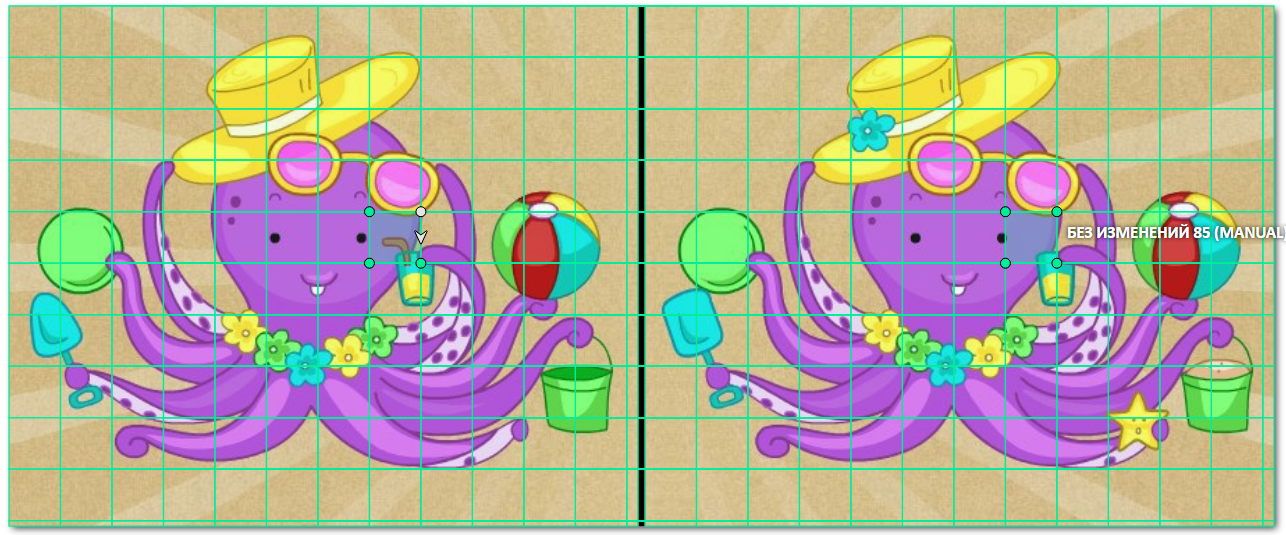
Первый вариант выглядел наиболее интересным, потому что я не представляла как это можно сделать. Но решение проблемы рано или поздно всплывает в голове, и вот что было решено сделать:
создать полигон из 8-ми точек
Данный недочет необходимо исправить. А также появилась новая идея: сделать так, чтобы при выборе одного бокса, второй бокс-дубликат с другого кадра автоматически изменялся. Я видела два варианта решения этого вопроса:
1. создать такую сетку, где bbox'ы будут связаны;
2. решить этот вопрос при обработке файла разметки
Первый вариант выглядел наиболее интересным, потому что я не представляла как это можно сделать. Но решение проблемы рано или поздно всплывает в голове, и вот что было решено сделать:
создать полигон из 8-ми точек
пошаговая демонстрация полигона

Для этого был написан следующий код:
import xml.etree.ElementTree as ET
from tqdm import tqdm
import os.path as osp
from PIL import Image
def new_glue_together(image1, image2, out_path):
img1 = Image.open(image1)
img2 = Image.open(image2)
width = img1.size[0]*2+int(img1.size[0]/80)
height = img1.size[1]
img = Image.new('RGB', (width, img1.size[1]))
img.paste(img1, (0,0))
img.paste(img2, (img1.size[0]+int(img1.size[0]/80), 0))
img.save(osp.join(out_path, f'{osp.basename(image1)}__{osp.basename(image2)}'))
def new_make_patches(w_start, h_start, ROWS_PER_IMAGE = 10):
coords = []
frame_w = w_start//2-int((w_start//2)*0.005964)
side = h_start//ROWS_PER_IMAGE
x, y, w, h = (0, 0, side, side)
while y < h_start:
x = 0
while x < frame_w:
w_ = min(w, frame_w - x)
h_ = min(h, h_start - y)
coords.append([
(x+w_,y),
(x+w_,y+h_),
(x,y+h_),
(x,y),
(x+w_ + frame_w + int(frame_w/80), y),
(x+w_ + frame_w + int(frame_w/80), y+h_),
(x + frame_w + int(frame_w/80), y+h_),
(x + frame_w + int(frame_w/80), y)
])
x += w
y += h
return coords
def pre_annotation(empty_annotation, pre_annotation):
tree = ET.parse(empty_annotation)
root = tree.getroot()
for child in tqdm(root):
if child.tag not in {'version', 'meta'}:
image_coords = new_make_patches(int(child.attrib['width']),
int(child.attrib['height']), 10)
for coord in image_coords:
str_coords = ""
for c in coord:
if c != coord[-1]:
str_coords += str(c[0])+', '+str(c[1])+'; '
else:
str_coords += str(c[0])+', '+str(c[1])
bbox = ET.Element('polygon', label="без изменений", occluded="0",
source="pre_annotated", points=str_coords,
z_order="0")
child.append(bbox)
xml_str = ET.tostring(root, encoding='utf-8', method='xml')
with open(osp.join(pre_annotation,'pre_annotation.xml'), 'wb') as xmlfile:
xmlfile.write(xml_str)
xmlfile.close()
Что изменилось:
Результат:
- переписана функция glue_together:
- а) добавлено создание "перегородки" между изображениями, имхо так легче понимать, где кончается один кадр и начинается другой
- переписана функция make_patches:
- а) список координат собирается под полигон, а не бокс
- б) учитывается добавленная "перегородка" между кадрами
- переписана функция pre_annotation:
- а) теперь она заточена на добавление полигонов, а не bbox'ов
Результат:
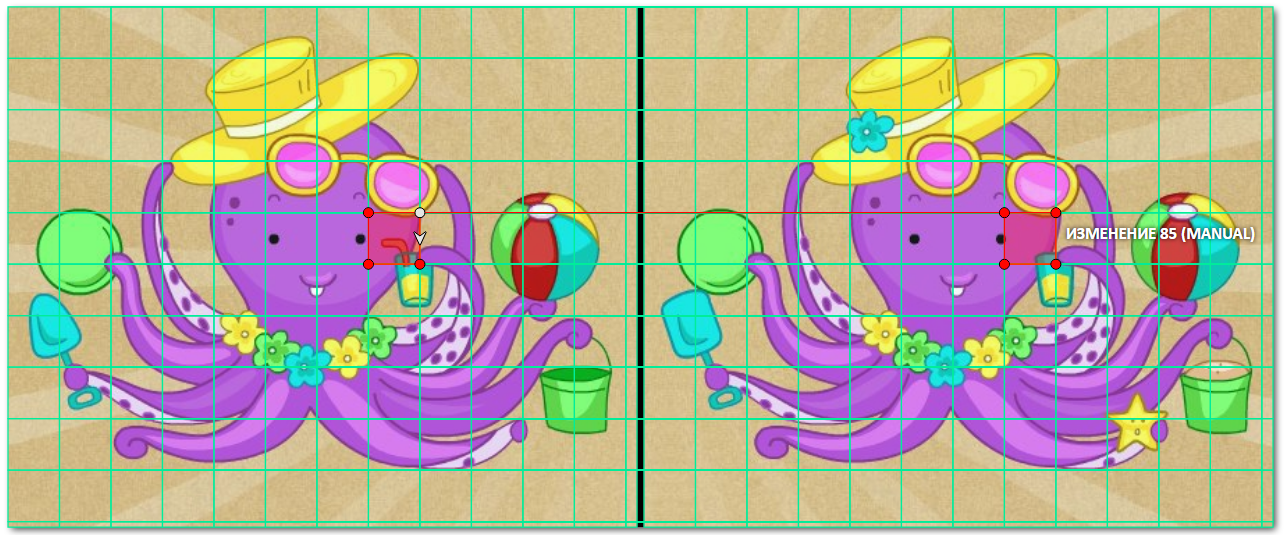
Вуаля! Скучная разметка данных превратилась в игру-головоломку.
Теперь можно подвести итоги
Посредством того, что мы визуализировали 2 кадра на одном изображении и создали сеточную предразметку, нам удалось добиться:
P.S. Исходные скрипты и фотографии можно найти на моем профиле гитхаба.
Посредством того, что мы визуализировали 2 кадра на одном изображении и создали сеточную предразметку, нам удалось добиться:
- создания комфортного процесса разметки для разметчиков;
- повышения качества разметки;
- повышения скорости разметки;
- предотвращения быстрой переутомляемости разметчиков.
P.S. Исходные скрипты и фотографии можно найти на моем профиле гитхаба.